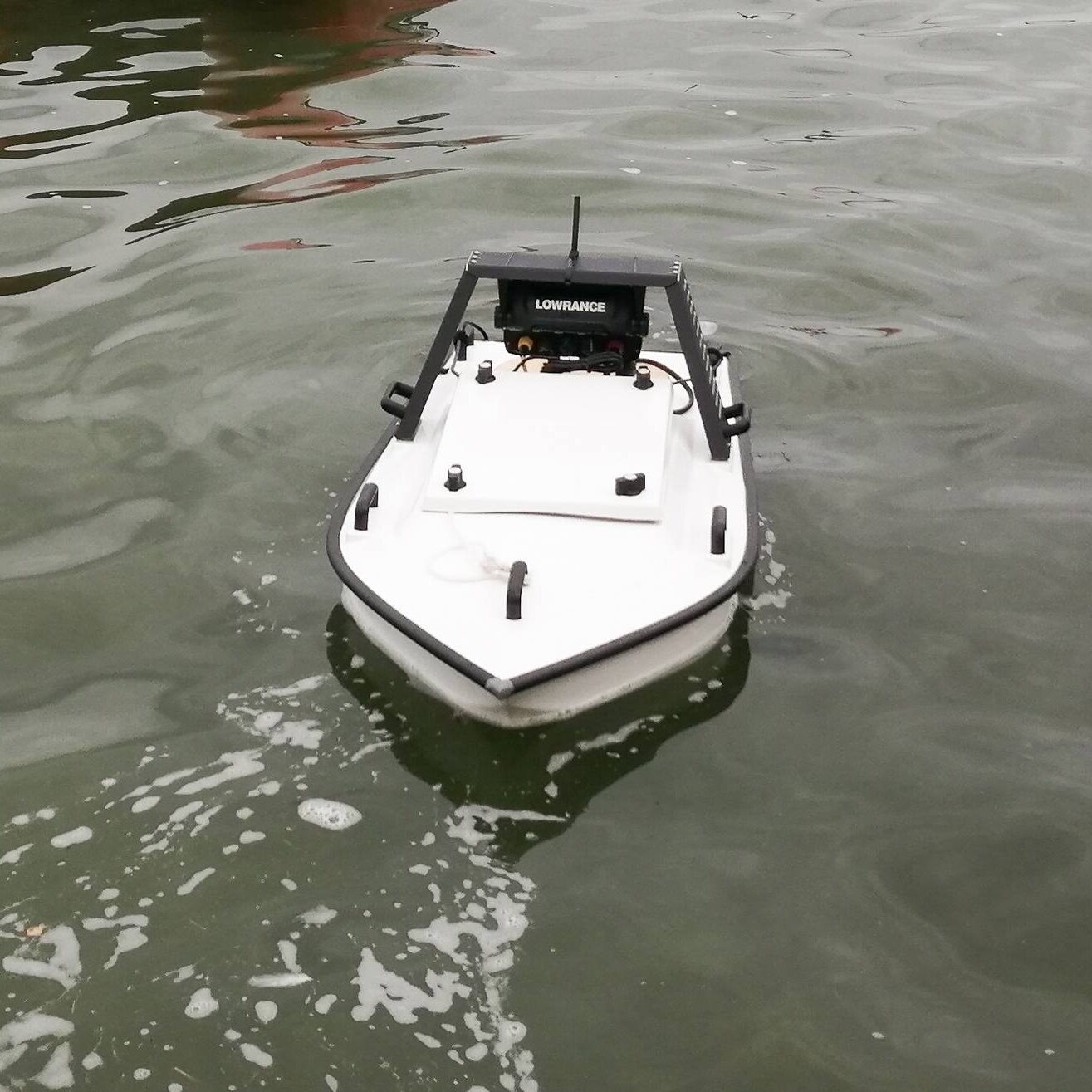
Narwal ASV (ang. Autonomus Surface Vehicle) to autonomiczny pojazd nawodny z systemem pomiarów geofizycznych i ferromagnetycznych, wspierany przez sztuczną inteligencję. Rozwiązuje problem wysokich kosztów i ograniczeń będących skutkiem warunków pracy, podczas badań i zbierania danych z akwenów wodnych. W centralnej części łodzi znajduje się studnia pozwalająca na instalację wybranych narzędzi pomiarowych.
Misja autonomicznego pływania po zadanej ścieżce:
Zadanie obszaru jaki ma być zmapowany
Określenie odległości pomiędzy liniami pomiarowymi
Określenie prędkości płynięcia ASV podczas pomiarów
Za pomocą modułu mozaikowego łączone są obrazy sonarowe z kolejnych pomiarów
Dokładność pozycjonowania GPS RTK
Transmisja online danych telemetrycznych o statusie łodzi ASV do mobilnego centrum operatora (uwzględniając informację o położeniu ASV na mapie, prędkości płynięcia, stanu akumulatora, poboru prądu, kursie).