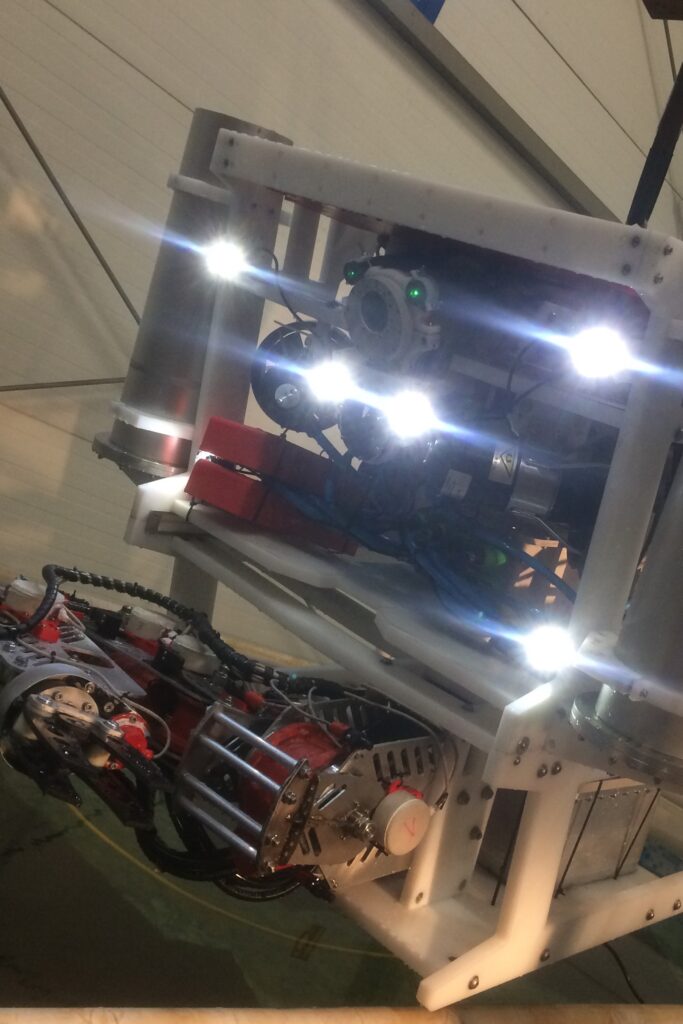
Projektując urządzenia, od początku mieliśmy wizję stworzenia pełnej rodziny robotów, które będą się wzajemnie uzupełniały w czasie wykonywania prac inspekcyjnych i poszukiwawczych. Co najważniejsze, stworzone przez nas pojazdy realizują działania w sposób do tej pory niedostępny – ze szczególnym naciskiem na bezpieczeństwo ludzi. Urządzenia SR Robotics można przyporządkować do kilku grup – ze względu na specyfikę zadania i warunki, w jakich będzie ono wykonywane.